選別パック詰めにおける
スマート技術導入の背景とその効果
秋田県立大学 生物資源科学部 アグリビジネス学科 准教授 山本 聡史
選果ラインの省力化を目指す
イチゴの生産量は、世界では増加しているが、日本では担い手や人手不足により減少傾向にある。こうした中、国内の主産地を中心に、最も手間がかかる選別パック詰め作業を生産者に代わって行う共同選果施設が増えている。イチゴの果実は、重量、形、色に基づき選別されるが、表皮が軟弱で損傷しやすく、初心者が作業すると「オセ」と呼ばれる跡が残るほどデリケートであるため、熟練の雇用労働者による人海戦術で選別パック詰めを行う共選がほとんどだ。
一方、重量選別に加え、近赤外線の吸収特性から果実の糖度や酸度を測定する選果ラインの導入が進む。この選果ラインでは、緩衝材を添付したフリートレイに果実を載せて損傷なく搬送し、1秒間に10果以上選別ができるが、導入コストが高いのが難点である。また、選果ラインへの果実供給と自動選別された果実のパック詰め作業は依然として人手で行う必要がある。この選果ラインの省力化を目指し、果実を傷つけないようにヘタを吸引して保持するパック詰めロボットが開発された。
パック詰めロボットの実証と検証
農研機構九州沖縄農業研究センターを中核として、JA阿蘇いちご部会で実施している農林水産省スマート農業実証プロジェクトの中で、同JAのパッケージセンターにおいて選別パック詰めロボットの実証試験を行った(写真)。

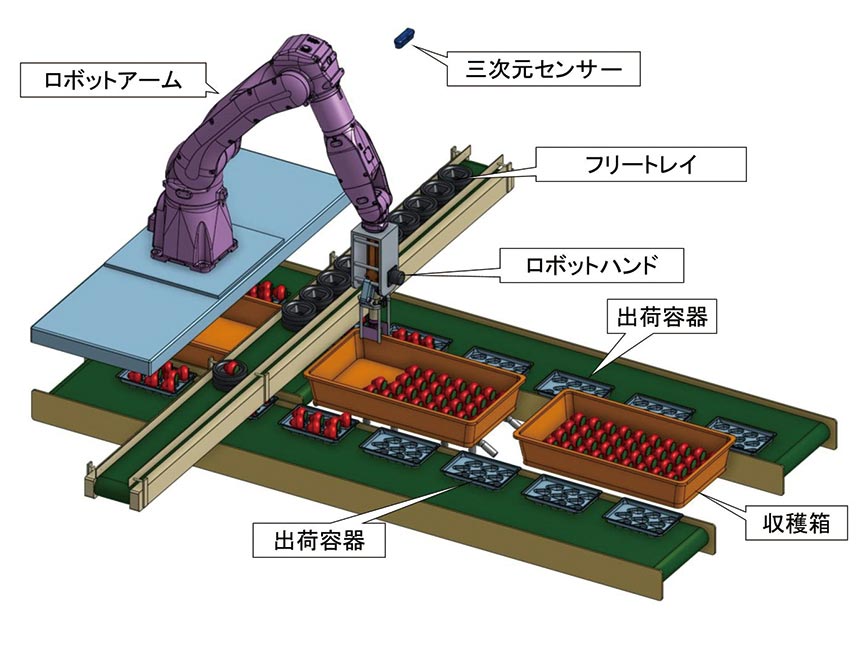
ロボットは、生産者から搬入された収穫箱の中を三次元センサーで撮影し、個々の果実の位置と方向を人工知能(AI)により認識した後、ハンドで拾い上げて出荷容器にパック詰めする。出荷容器の規格に合わない果実は、フリートレイに置かれ、作業者の手元まで搬送される。ハンドに大きな特徴があり、対のフィンガーで持ち上げるときに必要最小限の力で制御することで、果実を傷つけずにハンドリングする。1果当たり6秒弱で選別を行い、1時間に約10キロ処理する(図)。この処理能力は雇用労働者1名分に相当するが、現場からさらなる能率向上が求められた。そこで、導入コストに配慮しながら、この従来型ロボットの機能を最小限に絞ったプロトタイプを現場に設置した。
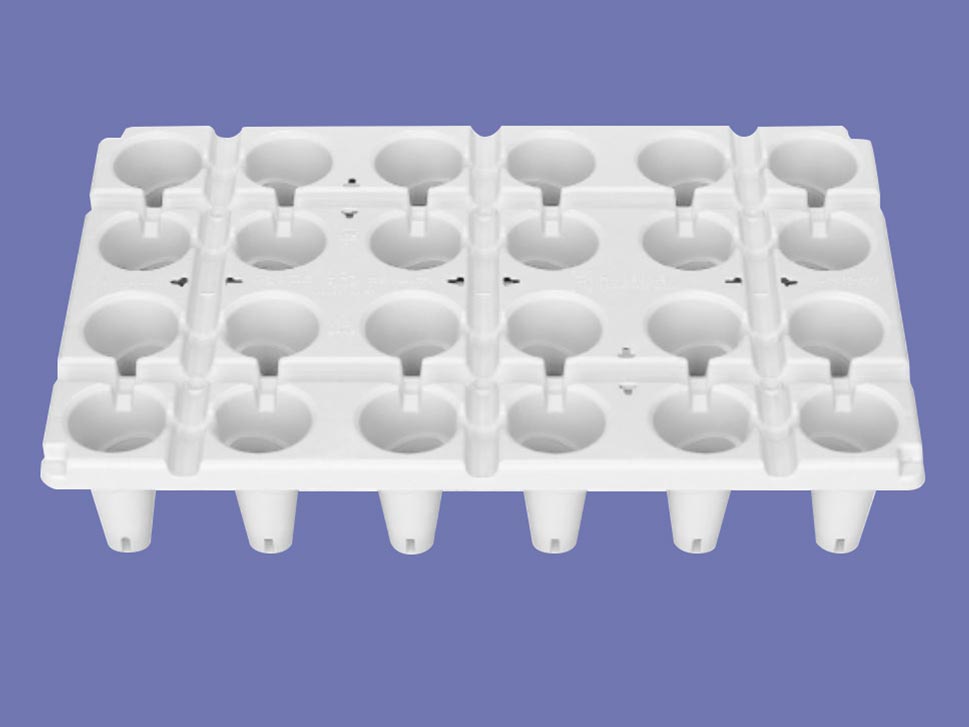
簡易型では、フィンガーで持ち上げる代わりに、掃除機のように果実を吸引して保持し、出荷容器に向きをそろえて並べる。吸引する力が強すぎると当然果実が傷むので、吸引管の先端に緩衝材を添付し、3キロパスカル(31グラム/平方センチメートル)程度の圧力でハンドリングする。また、収穫箱内の果実の高さにばらつきがあるため、吸引管内部のフォトセンサーで果実との距離をチェックしながら果実を押し付けることなく拾い上げる。出荷容器を自動供給する機構を備え、常時作業者がいなくても自動作業が可能である。流通時の果実損傷を大幅に低減する出荷容器「ゆりかーご」を使用するとともに、農研機構により果実損傷の評価手法の検討を進めるなど、ロボットが原因で果実の品質が落ちることのないように万全の体制を敷いている。
品質維持と軽労化が可能に
現状では、イチゴは果皮の温度が高いほど傷つきやすいため、共選では作業者が寒さに耐えながらパック詰めしている。将来、選別パック詰めロボットを予冷庫に設置すれば、果実の品質維持と作業者の軽労化を両立できると考えられる。
今後、同プロジェクトで進行している果実損傷の自動検出技術や収穫箱の中の果実の糖度・酸度を非破壊測定する先進的な技術(宇都宮大学)と連動するシステムを構築し、実証を進める予定である。